モータ・コントローラ・アプリケーション
Silicon Labs の MCU および電源製品は、卓越したミックスシグナル機能を提供し、モータコントローラ・アプリケーションに理想的です。
リファレンスデザイン、アプリケーションノート、ソフトウェアの例が、人気のモータタイプすべてに対してご利用いただけます。これらの例は、モータコントローラ・アプリケーションにおける高性能アナログ周辺機器のメリットを実証しています。
ステッパ・モータアプリケーション
AN155 は、C8051F300 MCU を使用して単極性ステッパ・モータのリファレンスデザインを完成させます。MCU は 3 V のロジックレベルのパワー MOSFET を直接駆動できます。単極性ステッパ・モータ・システムは、最低部品数と部品表(BOM)コストとともに正確な位置決めを提供します。
このリファレンスデザイン基盤には、C8051F300 MCU、4 つのパワー MOSFET が含まれ、ステッパ・モータ、ダイオード・クランプ型回路、電圧レギュレータ、RS232 インターフェイスが含まれます。このソフトウエアは、可変加速付きの線形速度プロファイラを実証します。
AN155 で提供されるソフトウエアは、マイナー改良をおこなった双極性ステッパ・モータを駆動するのためにも使用されます。双極性モータは、デュアル H ブリッジにより駆動し、モータ巻線全体を利用します。下のトランジスタは、MCU から直接駆動できます。上のトランジスタは、ハイサイド駆動回路が必要です。共通ベースの構成での 4 つの安価な NPN トランジスタは、(3 V のロジックレベルのパワー MOSFET の可用性によります)およそ 24 ボルトまでの双極性ステッパ・モータに使用できます。この極性はハイサイドポートのピンに対して反転する必要がありますのでご注意ください。双極性ステッパ・モータは、部品カウントがより多く、部品表(BOM)コストが上がります。
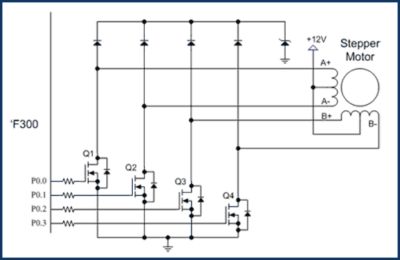
単極性ステッパ・モータドライブ
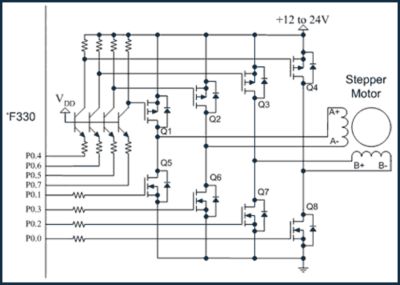
双極性ステッパ・モータドライブ
ブラシレス DC モータのアプリケーション
ブラシレス DC モータは、通常 3 相ブリッジを使用して駆動します。この回路の例では、ホール効果センサは位置フィードバックに使用されます。1 つのコミューテーションのパターンを使い、6 つのトランジスタのどれを使用するかを選択します。AN191 の例 4 - モータ制御ソフトウェアの例では、C8051F330 MCU を使った、ブラシレス DC モータ制御のシンプルな例を示しています。1 つの PCA モジュールが 8 ビット PWM モードで使用されています。シングル PWM 信号は、優先順位クロスバーを使用して下の 3 つのトランジスタ間で多重化されます。ADC は、ポテンショメータの電圧を測定するために使用します。
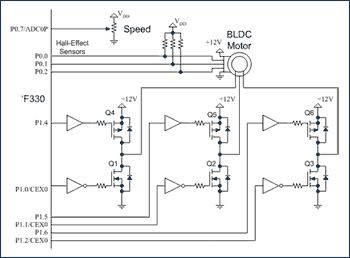
ホールセンサ付きブラシレス DC モータ
DC モータアプリケーション
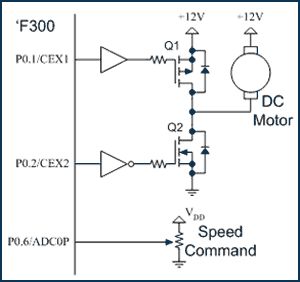
この簡単な DC モータ駆動回路は、シングル N チャネルのパワー MOSFET および Schottky ダイオードから構成されます。この回路は、単一方向に回転する DC モータの可変速度制御ができます。
AN191 の例 1 - モータ制御ソフトウェアの例は、C8051F300 MCU を使用した DC モータの簡単な例を示しています。このソフトウェアの例では、ADC と、8 ビット PWM モード用の PCA 1 台を使用します。ハードウェアベースの PWM には、CPU オーバーヘッドは必要なく、ユーザコードに対して 25 MIPS は利用可能なままになります。
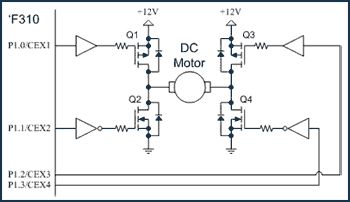
フルブリッジ回路を使用して、逆転が必要な場合に DC モータを駆動することができます。4 つのパワー MOSFET を使用して、DC モータの可変速度と逆転を提供します。この回路例では、ローサイド N チャネルトランジスタは、PWM 速度制御用に使用され、上部トランジスタはモータ方向を選択するために使用されます。
AN191 の例 2 - モータ制御ソフトウェアの例は、この回路構成を使用して逆転する DC モータ用のコード例を示しています。
DC モータの急な逆転は、パワー MOSFET に損傷を与える可能性があります。追加の回路は、モータのバック EMF を感知するために使用することができ、モータが停止する時に安全に逆転することができます。
AN191 の例 3 - モータ制御ソフトウェアの例は、この回路構成を使用してソフト逆転する DC モータのコード例を示しています。この例では、C8051F300 ADC のウィンドウ検出機能を使用して、バックエンド EMF を測定します。
ハーフブリッジは、アクティブブレーキと一方向制御が必要なアプリケーションに有用です。また、ハーフブリッジ回路は、より大きな DC モータの電力損失を低減するために使用することもできます。上部のパワー MOSFET での電力損失は、Schottky ダイオードを使用するよりも低くなる場合があります。ハーフブリッジ DC モータドライブは、デッドタイム付きのセンターアライン PWM が必要です。
AN191 の例 7 - モータ制御ソフトウェアの例は、デッドタイム付き中央整列型 PWM のコードレイを示しています。このソフトウェア・ベースの PWM コードは、3 つの PCA モジュールと単一の割り込みサービス・ルーチンを使用します。割り込みサービス・ルーチンは、1.4 MIPS のみを使用し、ユーザコード用 23.6 MIPS を残します。
フルブリッジは、いずれかの方向に正負のトルクおよび回転を実現する完全型の 4 象限制御を必要とするサーボのアプリケーションで使用されます。アクティブブレーキ付き。4 象限 DC モータドライブには、デッドタイム付きのセンターアライン PWM の 4 つのチャンネルが必要です。
AN191 の例 7 - モータ制御ソフトウェアの例は、4 つのセンターアライン PWM チャネルに簡単に拡張できます。この改訂版 PWM コードは、5 つの PCA モジュールと単一の割り込みサービス・ルーチンを使用します。この割り込みサービス・ルーチンは、2.8 MIPS のみを使用し、ユーザコードに 22.2 MIPS は残します。
センターアライン PWM コードは、象限デコードコードとシンプルな PID コントローラで完全なサーボ制御システムを形成することができます。
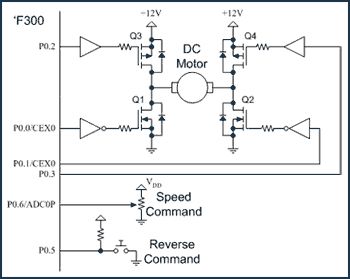
逆転付き DC モータ
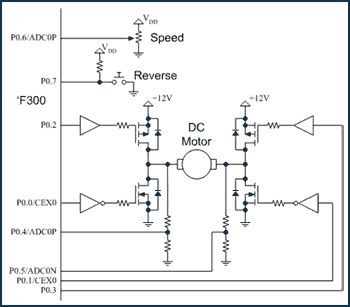
ソフト逆転付き DC モータ
ハーフブリッジ DC モータドライブ
4 象限 DC モータドライブ
AC モータアプリケーション
AC 誘導モータには、正弦波変調による 3 つの PWM 信号が必要です。このサンプル回路は、三相トランジスタブリッジを使用して、AC 誘導モータを駆動します。3 つの PCA モジュールが使用されている 8 ビット PWM モードを使用して、3 つのハーフブリッジを駆動します。この構成は、デッドタイム内蔵のゲートドライブを使用する必要があります。下部トランジスタがリセット時にオンになっていることの確認用に、プルダウン抵抗器が必要になることがあります。
AN191 の例 5 - モータ制御ソフトウェアの例は、一定の V/Hz 制御を使用した AC 誘導モータ制御の簡単な例を示します。3 つのハードウェアベースの 8 ビット PWM には、オーバーヘッドは必要ありません。単一タイマー・ベースの割り込みサービス・ルーチンは、正弦波の計算とアップデートに使用されます。ISR は 1 MIP 未満を使用し、24 MIPS をユーザコード用に使用できるように残します。
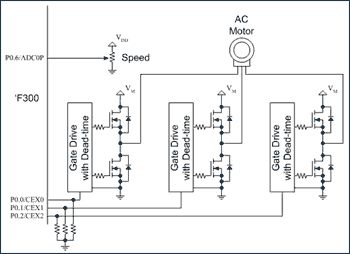
AC 誘電動機
基準設計の検索