


EFR32FG28B310F1024IM68
仕様
主要仕様
|
MCU コア
ARM Cortex-M33
|
フラッシュ (kB)
1024
|
RAM (kB)
256
|
||
|
サブ GHz 対応
あり
|
パッケージ・タイプ
QFN48
|
デジタル I/O ピン
31
|
||
|
Secure Vault
高
|
|
MCU コア
ARM Cortex-M33
|
|
フラッシュ (kB)
1024
|
|
RAM (kB)
256
|
|
サブ GHz 対応
あり
|
|
パッケージ・タイプ
QFN48
|
|
デジタル I/O ピン
31
|
|
Secure Vault
高
|
EFR32xG28 エクスプローラー・キット
EFR32xG28 エクスプローラー・キットは、EFR32xG28 System-on-Chip をベースにしたスモール・フォーム・ファクタの開発および評価プラットフォームです。EFR32xG28 エクスプローラー・キットは、Wi-SUN、Amazon Sidewalk、Wireless M-BUS、独自規格のネットワーク等、サブ GHz や Bluetooth LE 用の IoT アプリケーションの迅速なプロトタイピングとコンセプト作成に焦点を当てています。

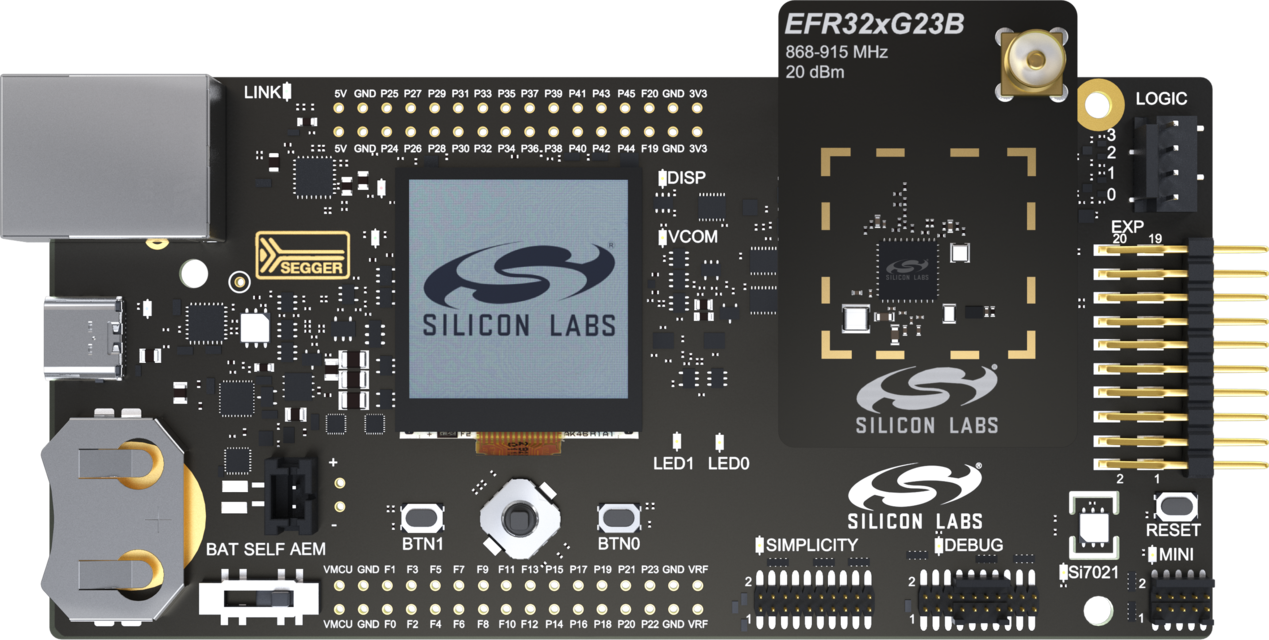
EFR32xG28 Pro キット +20 dBm
EFR32xG28 +20 dBm Pro キットは、Wi-SUN、Amazon Sidewalk、Wireless M-BUS、Silicon Labs CONNECT、独自規格プロトコル、Bluetooth Low EnergyなどのサブGHzおよび2.4 GHzプロトコルに基づくワイヤレスIoTデバイスの開発をサポートするように設計されています。
EFR32xG28 Pro キット +14 dBm
EFR32xG28 + dBm Pro キットは、Wi-SUN、Amazon Sidewalk、Wireless M-BUS、Silicon Labs CONNECT、独自規格プロトコル、Bluetooth Low Energy などのサブ GHz および 2.4 GHz プロトコルに基づくワイヤレス IoT デバイスの開発をサポートするよう設計されています。
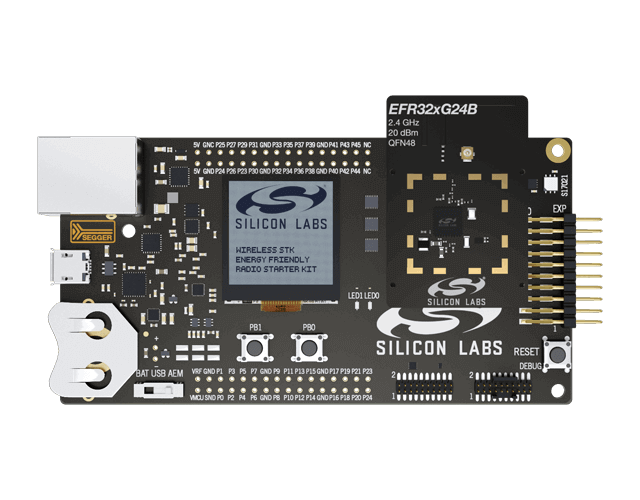
EFR32xG28 2.4 GHz BLE および +14 dBm 無線基板
EFR32xG28 2.4 GHz BLE と +14 dBm 無線基板は、STK メイン・ボードと連動して使うように設計されており、独自規格、Connect、Z-Wave、Wi-SUN、Bluetooth Low Energy 用のサブ GHz および 2.4 GHz BLE ワイヤレス・プロトコルに基づくワイヤレス IoT デバイスの開発をサポートします。

EFR32xG28 2.4 GHz BLE および +20 dBm 無線基板
EFR32xG28 2.4 GHz BLE と +20 dBm 無線基板は、STK メイン・ボードと使うように設計されており、独自規格、Connect、Z-Wave、Wi-SUN、Bluetooth Low Energy 用のサブ GHz および 2.4 GHz BLE ワイヤレス・プロトコルに基づくワイヤレス IoT デバイスの開発をサポートします。
技術文書
ソフトウェアとツール
EFR32xG28 エクスプローラー・キット
EFR32xG28 エクスプローラー・キットは、EFR32xG28 System-on-Chip をベースにしたスモール・フォーム・ファクタの開発および評価プラットフォームです。EFR32xG28 エクスプローラー・キットは、Wi-SUN、Amazon Sidewalk、Wireless M-BUS、独自規格のネットワーク等、サブ GHz や Bluetooth LE 用の IoT アプリケーションの迅速なプロトタイピングとコンセプト作成に焦点を当てています。
EFR32xG28 Pro キット +20 dBm
EFR32xG28 +20 dBm Pro キットは、Wi-SUN、Amazon Sidewalk、Wireless M-BUS、Silicon Labs CONNECT、独自規格プロトコル、Bluetooth Low EnergyなどのサブGHzおよび2.4 GHzプロトコルに基づくワイヤレスIoTデバイスの開発をサポートするように設計されています。
EFR32xG28 Pro キット +14 dBm
EFR32xG28 + dBm Pro キットは、Wi-SUN、Amazon Sidewalk、Wireless M-BUS、Silicon Labs CONNECT、独自規格プロトコル、Bluetooth Low Energy などのサブ GHz および 2.4 GHz プロトコルに基づくワイヤレス IoT デバイスの開発をサポートするよう設計されています。
EFR32xG28 2.4 GHz BLE および +14 dBm 無線基板
EFR32xG28 2.4 GHz BLE と +14 dBm 無線基板は、STK メイン・ボードと連動して使うように設計されており、独自規格、Connect、Z-Wave、Wi-SUN、Bluetooth Low Energy 用のサブ GHz および 2.4 GHz BLE ワイヤレス・プロトコルに基づくワイヤレス IoT デバイスの開発をサポートします。
EFR32xG28 2.4 GHz BLE および +20 dBm 無線基板
EFR32xG28 2.4 GHz BLE と +20 dBm 無線基板は、STK メイン・ボードと使うように設計されており、独自規格、Connect、Z-Wave、Wi-SUN、Bluetooth Low Energy 用のサブ GHz および 2.4 GHz BLE ワイヤレス・プロトコルに基づくワイヤレス IoT デバイスの開発をサポートします。
品質と包装
品質保証、環境および包装に関する情報
Silicon Labs では、すべての標準製品について最低で 10 年のライフサイクルを目標としており、EFR32FG28B310F1024IM68 に関しては 8月 2033まで製造予定です。
上記の耐用年数は、この部品番号の優先改訂用です。部品番号改訂の完全リストについては、下の検索ボタンを使用してください。
供給継続のための継続的なコミットメントの一環として、サプライチェーンの調整、製品の改善、市場の状況、または同様のビジネス業務上や技術的な問題により、Silicon Labs が必要であると判断した場合、Silicon Labs はピンと互換性があり、機能的に同等の代替製品を提供することがあります。
ビジネス、技術またはその他の理由で Silicon Labs が妥当とする采配を超えた場合、Silicon Labs は、製品を製造中止する必要があると判断し、通知から 6 か月で最後の注文をおこない、通知から 12 か月で最後の出荷をおこなう旨を伝える EOL 通知を発行することをポリシーとしています。本ポリシーは、半導体業界で一般的に使用されている JEDEC 規格 EIA/JESD48 に準拠しています。製品のライフサイクルに必要なサポートを提供します。

Silicon Labsのデバイスの品質、環境、デバイスの構成、テスト結果、出荷、サプライチェーンに関する追加情報を検索し、ダウンロードすることができます。
検索結果には以下が含まれます。
- 製品情報
- 梱包情報
- 品質システム認証
- 財務情報
- 紛争鉱物(CMRT)
- 環境情報
- RoHS 準拠証明書
- REACH 宣言
- 詳細なデバイス構成 (MDDS)
- MCD/FMD
- RoHS 準拠証明書
- 認定データ
- 貿易コンプライアンス:ECC/HTS コード
- サプライチェーン情報
- IPC 1752-2 クラス6 (XML 形式)
- ICP テスト・レポート
- ハロゲンフリー準拠証明書
- PFOS 準拠証明書
- 供給保証書 (長期)
コミュニティとサポート
